
Inhaltsverzeichnis:
- Autor John Day day@howwhatproduce.com.
- Public 2024-01-30 07:21.
- Zuletzt bearbeitet 2025-01-23 12:52.

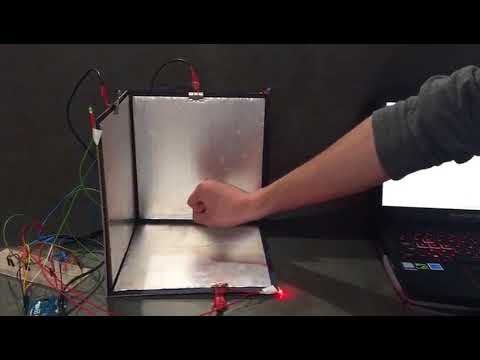

In dieser Anleitung wird erklärt, wie die Bewegung einer Hand in einem 3D-Raum nach dem Prinzip der kapazitiven Abtastung verfolgt werden kann. Wenn Sie den Abstand zwischen einer geladenen Aluminiumfolie und Ihrer Hand ändern, ändert sich die Kapazität des Kondensators. Diese Methode kann als Low-End-Alternative für Trägheits- und optische Systeme verwendet werden, um Bewegungen im 3D-Raum zu verfolgen. In diesem Prototyp haben wir LEDs hinzugefügt, die leuchten, wenn sich das Objekt zu nahe an die Aluminiumfolie heranbewegt.
Schritt 1: Erforderliche Werkzeuge und Materialien
- 3x 270k Ohm Widerstand
- 3x 10k Ohm Widerstand
- 3x Krokodilklemme
- 1x rote LED
- 1x blaue LED
- 1x Grüne LED
- 3x 220 Ohm Widerstand
- Löten
- Schrumpfen durch Hitze
- Schirmkabel
- Arduino Uno
- Aluminiumfolie
- Karton
- Band
- Sprühkleber
- Steckbrett
- Anschlussdrähte (unterschiedliche Längen)
Schritt 2: Konstruieren des Rahmens




Schneiden Sie drei quadratische Stücke Karton (250x250 mm) und drei quadratische Stücke Aluminiumfolie (230x230 mm) aus. Sprühkleber auf eine Seite der Alufolie auftragen und jeweils auf die Kartonstücke auftragen. In diesem Prototyp dienen die Aluminiumfolien als unsere kapazitiven Sensoren. Achten Sie daher darauf, dass zwischen der Alufolie und dem Rand des Kartons genügend Platz ist, damit sich die verschiedenen Folien nach dem Zusammenbau des Rahmens nicht berühren. Sobald die Folie auf den Karton aufgebracht ist, ist es an der Zeit, die drei Kartonteile mit Klebeband zusammenzusetzen, um den Rahmen zu vervollständigen. Stellen Sie auch hier sicher, dass es keinen Kontakt zwischen den verschiedenen Aluminiumfolienblättern gibt.
Schritt 3: Verdrahtung der Schirmdrähte mit der Platte und Arduino



Es ist wichtig, ein abgeschirmtes Kabel zu verwenden, um die Folien mit dem Stromkreis zu verbinden. Die Verwendung normaler Kabel erzeugt einen Antenneneffekt und stört Ihre Sensorwerte. Stellen Sie sicher, dass Sie 3 geschirmte Kabel mit einer Länge von ca. 50 cm haben. Nehmen Sie ein Kabel, streifen Sie den Draht ab, schneiden Sie die Abschirmdrähte ab und verwenden Sie nur den inneren Draht, um ihn zu verbinden, indem Sie den Draht an die Krokodilklemme löten. Stellen Sie sicher, dass Sie einen Schrumpfschlauch anwenden, um die Lötverbindung abzudecken. Befestigen Sie die Krokodilklemmen an der Aluminiumfolie.
Verbinden Sie alle Schirmdrähte mit der positiven Reihe Ihres Steckbretts. Verbinden Sie dann diese positive Reihe mit dem 5V-Anschluss Ihres Arduino. Nehmen Sie nun den Hauptdraht vom Schirmkabel und schalten Sie einen 10k Ohm und einen 220k Ohm Widerstand parallel. Verbinden Sie dies mit dem Ausgangsport Ihres Arduino (wir haben 8, 9 und 10 verwendet).
Wiederholen Sie diesen Schritt noch 2 Mal für die anderen Ebenen des Prototyps.
Schritt 4: Verdrahtung der LEDs




Löten Sie die Enden der LEDs an einen langen Draht, damit er die Ecken der jeweiligen Platten von der Arduino-Platine erreichen kann.
Wir haben die Pins 2, 3 und 4 als Ausgangspins für unsere LEDs verwendet. Dieser Ausgang ist mit dem Steckbrett verbunden und mit dem positiven Bein der LED verbunden. Der negative Schenkel der LED wird dann mit dem 330 Ohm Widerstand verbunden. Das andere Ende des Widerstands ist mit der Masse des Steckbretts verbunden, die mit der Masse des Arduino verbunden ist. Wiederholen Sie dies für alle 3 LEDs. In unserem Prototyp ist die blaue LED mit der Y-Ebene verbunden, die rote LED mit der Z-Ebene und die grüne LED mit der X-Ebene. Kleben Sie die LEDs auf die entsprechenden Ebenen, um direktes Feedback bei der Verwendung des Prototyps zu erhalten.
Wenn Sie kein Steckbrett verwenden und das Schirmkabel direkt mit dem Arduino verbinden möchten, können Sie das angehängte Bild für eine schöne Übersicht der Lötverbindungen sehen. Ihre endgültigen Verbindungen sollten wie im Übersichtsbild aussehen.
Schritt 5: Codierung
Im Anhang haben wir den Code platziert, den wir für dieses Experiment verwendet haben. Für zusätzliche Einblicke wird nach jedem Hauptbefehl ein Kommentar platziert, der erklärt, was im Code passiert. Öffnen Sie den Code in Ihrer Arduino-Software auf Ihrem PC und laden Sie ihn auf Ihren Arduino hoch. Wenn Sie einen Laptop verwenden, stellen Sie sicher, dass dieser aufgeladen wird; Andernfalls funktioniert Ihr Prototyp nicht.
Schritt 6: Verwenden des Prototyps
Diese Art der 3D-Bewegungsverfolgung ist sehr empfindlich für Umgebungsvariablen. Stellen Sie daher sicher, dass Sie die Werte im Code auf Ihre eigene Situation kalibrieren. Sie können einfach den seriellen Monitor verwenden, um die richtigen Werte zu erhalten. Tipp: Sie können selbst eine Kalibrierung einbauen, die beim Ausführen des Codes die Durchschnittswerte + 10 % annimmt. Im Video wird demonstriert, wie der Prototyp richtig funktionieren soll.
Empfohlen:
Leap-Motion-Controller. (Progetto Arduino): 4 Schritte
: 4 Schritte")
Leap-Motion-Controller. (Arduino Progetto): Progetto-Quest-Progetto und Leap-Motion-Steuerung per Kontrolle der Intensität und Farbe der RGB-LEDs in der Bewegungsumgebung des Mani-nello-Spazio.Referenz:Leap Motion SDK: https:// entwicklerarchiv.leapmotion.com/doc
So führen Sie eine Kraftkalibrierung auf einem CombiTouch durch: 6 Schritte

So führen Sie eine Kraftkalibrierung auf einem CombiTouch durch: Diese Anleitung zeigt, wie Sie eine Kraftkalibrierung auf einem Alto-Shaam CombiTouch-Ofen durchführen. Wenn der Bildschirm nicht auf die Berührung reagiert oder ein anderes Symbol aktiviert als das, das Sie berühren, folgen Sie einfach diesen Anweisungen. Wenn die
HAIKU, wenn Mode und Technologie verschmelzen. TfCD-Projekt. TU Delft.: 4 Schritte

HAIKU, wenn Mode und Technologie verschmelzen. TfCD-Projekt. TU Delft.: Haiku ist ein von Mucahit Aydin entwickeltes Konzept für einen MSc-Studiengang der TU Delft. Das Hauptprinzip dieses Kimonos ist es, das Gefühl zu verstärken, von jemandem umarmt zu werden. Dazu zeigt der Kimono nach Berührung ein Muster. Wie? Durch implementieren
Navigieren Sie durch die Software des Raspberry Pi: Teil 2: 10 Schritte

Navigieren Sie durch die Software des Raspberry Pi: Teil 2: Diese Lektion ist eine Fortsetzung Ihrer Befehlszeilenausbildung. Während Sie mit dem Raspberry Pi arbeiten, installieren Sie zweifellos neue Software zum Lernen, Ausprobieren und Erstellen. In dieser Lektion erfahren Sie, wie Sie Softwarepakete installieren und
[Arduino-Roboter] Wie erstelle ich einen Motion-Capture-Roboter - Daumen Roboter - Servomotor - Quellcode: 26 Schritte (mit Bildern)
![[Arduino-Roboter] Wie erstelle ich einen Motion-Capture-Roboter - Daumen Roboter - Servomotor - Quellcode: 26 Schritte (mit Bildern)](https://i.howwhatproduce.com/images/001/image-1599-93-j.webp "[Arduino-Roboter] Wie erstelle ich einen Motion-Capture-Roboter - Daumen Roboter - Servomotor - Quellcode: 26 Schritte (mit Bildern)")
[Arduino-Roboter] Wie erstelle ich einen Motion-Capture-Roboter | Daumen Roboter | Servomotor | Quellcode: Thumbs Robot. Verwendet ein Potentiometer des Servomotors MG90S. Es macht sehr viel Spaß und ist einfach! Der Code ist sehr einfach. Es sind nur etwa 30 Zeilen. Es sieht aus wie ein Motion-Capture.Bitte hinterlassen Sie Fragen oder Feedback![Anleitung] Quellcode https://github.c