
Inhaltsverzeichnis:
- Schritt 1: Wie dosiert es?
- Schritt 2: Bitte vor dem Start beachten
- Schritt 3: Sammeln Sie das gesamte Material
- Schritt 4: Verschiedene Abmessungen
- Schritt 5: Den Körper herstellen
- Schritt 6: Aktuatormontage und Plattenherstellung
- Schritt 7: Manupalierung der Welleneigenschaften
- Schritt 8: Elektronische Verbindungen und Programm
- Schritt 9: Steuerung der Aktuatoren durch menügesteuertes Programm
- Schritt 10: Wie man Wave Tank bedient
- Autor John Day day@howwhatproduce.com.
- Public 2024-01-30 07:20.
- Zuletzt bearbeitet 2025-01-23 12:52.



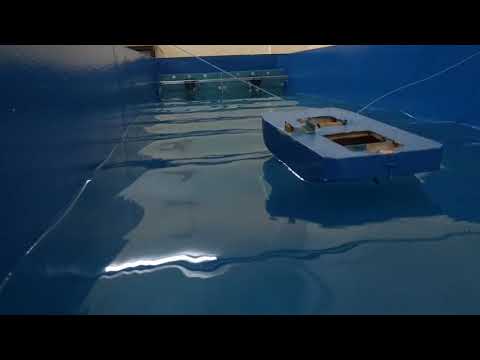
Ein Wellenbecken ist ein Laboraufbau zur Beobachtung des Verhaltens von Oberflächenwellen. Der typische Wellentank ist eine mit Flüssigkeit, normalerweise Wasser, gefüllte Kiste, die oben einen offenen oder luftgefüllten Raum lässt. An einem Ende des Tanks erzeugt ein Aktuator Wellen; das andere Ende weist normalerweise eine wellenabsorbierende Oberfläche auf.
Normalerweise kosten diese Tanks viel Geld, daher habe ich versucht, eine wirklich sehr günstige Lösung für Studenten zu entwickeln, die den Tank zum Testen ihrer Projekte verwenden möchten.
Schritt 1: Wie dosiert es?
Das Projekt besteht also aus zwei Aktuatoren, die aus V-Nut-Aluminium-Strangpressprofilen hergestellt wurden.
An jeden Aktuator ist ein Schrittmotor angeschlossen und beide Motoren werden von demselben Schrittmotorantrieb gesteuert, sodass keine Verzögerung auftritt.
Arduino wird verwendet, um den Motortreiber zu steuern. Ein menügesteuertes Programm wird verwendet, um Eingaben an das über den PC angeschlossene arduion zu geben. Auf dem V-Nut-Portal sind Betätigungsplatten montiert, die beim Starten der Motoren hin und her gehen und diese Hin- und Herbewegung der Platten erzeugt die Wellen im Tank. Die Wellenhöhe und Wellenlänge können durch Ändern der Geschwindigkeit des motor über arduino.
Schritt 2: Bitte vor dem Start beachten

Ich habe die meisten kleinen Dinge nicht behandelt, wie man Arduino verwendet oder wie man schweißt, um dieses Tutorial klein und leicht verständlich zu halten. Die meisten der fehlenden Dinge werden in den Bildern und Videos gelöscht. Bei Problemen oder Fragen zum Projekt bitte eine Nachricht an mich.
Schritt 3: Sammeln Sie das gesamte Material
- Arduino-Mikrocontroller
- 2 * Schrittmotor (2,8 kgcm Drehmoment pro Motor)
- 1 * Schrittmotortreiber
- 2 * V-Schlitz-Portalsystem
- Stahl- oder Eisenplatten für Tankkörper
- L-Versteifungen zur Unterstützung des Körpers
- Faser- oder Plastikfolie zur Herstellung der Betätigungsplatte
- Kabel 48-Volt-DC-Netzteil
Ich habe keine Materialien für das V-Slot-Portal enthalten, da die Liste sehr groß sein wird, dann erhalten Sie einfach bei Google V-Slot viele Videos zur Montage. Motorkapazität und Stromversorgungskapazität ändern sich, wenn Sie mehr Last tragen möchten.
Tankabmessungen
Länge 5,50 m
Breite 1,07 m²
Tiefe 0,50 m
Schritt 4: Verschiedene Abmessungen



Um die Dinge einfacher zu machen und das Tutorial kürzer zu machen, habe ich Bilder von verschiedenen Komponenten mit einer Skala aufgenommen, damit Sie die Größe dieser sehen können.
Schritt 5: Den Körper herstellen




Körper besteht aus 3 mm dickem Gusseisenblech.
Die Tankbreite beträgt 1,10 Meter, die Länge 5 Meter und die Höhe 0,5 Meter.
Der Tankkörper besteht aus Baustahl mit Versteifungen, wo immer dies erforderlich ist. Baustahlplatten wurden gebogen und entsprechend den Tankabmessungen in verschiedene Abschnitte geschnitten. Diese Abschnitte wurden dann durch Zusammenschweißen errichtet. Versteifungen wurden auch zusammengeschweißt, um die Struktur stärker zu machen.
Die erste Platte wurde in verschiedenen Abschnitten auf die gewünschte Größe gebogen und dann wurden diese Abschnitte zum Aufrichten der Karosserie zusammengeschweißt. Steifen wurden als Stütze hinzugefügt. Die Abmessungen der Steifen sind im Bild gezeigt
Schritt 6: Aktuatormontage und Plattenherstellung



Aktuatoren werden mit V-Nut-Systemen hergestellt. Diese sind wirklich billig und einfach zu bauen. Sie können online googeln, wie man eines davon zusammenbaut. Ich habe Leitspindeln anstelle eines Riemenantriebs verwendet, um die Tragfähigkeit zu erhöhen. Ich habe kein Montage-Tutorial beigefügt, da es sich je nach Last ändert, die Sie tragen möchten. Bei mir lag die Belastung bei maximaler Geschwindigkeit bei etwa 14 kg.
Die Betätigungsplatte besteht aus GFK-Blech, Acryl kann ebenfalls verwendet werden. Ein Edelstahlrahmen wurde gebaut, um das GFK-Blech zu tragen.
Paddelrahmen
Der Paddelrahmen besteht aus Edelstahl. Edelstahl ist wasserdicht und somit korrosionsbeständig. Für den Paddelrahmen wurde ein quadratischer Querschnitt von 2 x 2 cm verwendet. Ein stabiler Rahmen war notwendig, da während der Wellenerzeugung viel zyklische Belastung auf das Paddel einwirkt. Der Stahlrahmen verbiegt sich nicht und erzeugt somit eine regelmäßige Sinuswelle.
Eine kundenspezifische L-Klemme wurde hergestellt, um die Aktuatorplatte mit der Portalplatte des vslot-Systems zu verbinden.
Schritt 7: Manupalierung der Welleneigenschaften



Tank kann je nach Anforderung unterschiedliche Wellenhöhen erzeugen. Um unterschiedliche Wellenhöhen zu erzeugen, wird die Drehzahl des Motors angepasst. Um eine große Wellenhöhe zu erreichen, wird die Drehzahl des Motors erhöht und die Wellenlänge verringert. In ähnlicher Weise wird die Wellenlänge des Motors verringert, um die Wellenlänge zu erhöhen. Die Drehzahl kann durch Auswahl der benutzerdefinierten Drehzahloption aus dem Menü angepasst werden.
Maximale Drehzahl = 250
Mindestdrehzahl = 50
Unten ist das Beispiel einer unterschiedlichen Wellenhöhe, wie sie von einem Beschleunigungsmesser aufgezeichnet wurde. Das erste Bild sind die Daten, die mit hoher Drehzahl aufgenommen wurden, als Ergebnis erhalten wir eine hohe Wellenhöhe. Das zweite Bild zeigt die verringerte Wellenhöhe und die erhöhte Wellenlänge des Diagramms, das die vom Beschleunigungsmesser aufgezeichneten Daten darstellt und die tatsächlichen Welleneigenschaften der erzeugten Welle darstellt.
Schritt 8: Elektronische Verbindungen und Programm

Achten Sie beim Anschließen der Stromversorgung auf die Polarität des Anschlusses, verbinden Sie den Pluspol mit dem Pluspol und den Minuspol mit dem Minus. Stellen Sie die Anschlüsse für den Motor und den Treiber wie in der Abbildung gezeigt her. Sobald alle Anschlüsse richtig sind, verbinden Sie die Mikrocontroller-Pins (8, 9, 10 und 11.)) zum Schrittmotortreiber. Verbinden Sie den Mikrocontroller über einen USB mit einem PC. Starten Sie Arduino IDE > Serieller Monitor.
Das Programm ist im Tutorial enthalten und selbsterklärend. Es verwendet Schaltkasten und andere Anweisungen zur Bedienung. Es ist wirklich einfach, ein Gymnasiast kann es auch verstehen.
Hier ist der Google Drive-Link zum Programm
Arduino-Steuerungsprogramm
Schritt 9: Steuerung der Aktuatoren durch menügesteuertes Programm

Sobald der Mikrocontroller richtig an den PC angeschlossen ist, wird ein ähnliches Menü angezeigt. Um die Option auszuwählen, geben Sie einfach die Zahl neben der Option ein und drücken Sie die Eingabetaste
Beispiel:-
Um „Betätigung mit maximaler Frequenz“auszuwählen, geben Sie 1 ein und drücken Sie die Eingabetaste.
Um die Aktion zu stoppen, geben Sie 0 ein und drücken Sie die Eingabetaste.
Not-Halt
Um den Antrieb zu stoppen drücken Sie die Null „0“und geben Sie ein.
Um einen Notstopp durchzuführen, drücken Sie entweder Reset am Mikrocontroller oder unterbrechen Sie die Stromversorgung.
Schritt 10: Wie man Wave Tank bedient

Dieser Tank wurde im Rahmen meines Großprojekts hergestellt. Der Tank wurde für ein maßstabsgetreues Barge-Modell auf die Erzeugung unterschiedlicher regelmäßiger Wellen bei Seegangsbedingung getestet. Die Prüfung des Wellenkanals war erfolgreich. Die Gesamtkosten für die Entwicklung dieses Projekts betrugen Rs. 81.000 (nur einundachtzigtausend) in einer Dauer von zwei Monaten.
Bei Fragen bitte kommentieren.

Erster Preis beim Wasserwettbewerb
Empfohlen:
Heimwerken -- Einen Spinnenroboter herstellen, der mit einem Smartphone mit Arduino Uno gesteuert werden kann – wikiHow

Heimwerken || Wie man einen Spider-Roboter herstellt, der mit einem Smartphone mit Arduino Uno gesteuert werden kann: Während man einen Spider-Roboter baut, kann man so viele Dinge über Robotik lernen. Wie die Herstellung von Robotern ist sowohl unterhaltsam als auch herausfordernd. In diesem Video zeigen wir Ihnen, wie Sie einen Spider-Roboter bauen, den wir mit unserem Smartphone (Androi
Bewegungsaktivierte Cosplay Wings mit Circuit Playground Express - Teil 1: 7 Schritte (mit Bildern)
")
Bewegungsaktivierte Cosplay-Flügel mit Circuit Playground Express - Teil 1: Dies ist Teil 1 eines zweiteiligen Projekts, in dem ich Ihnen meinen Prozess zur Herstellung eines Paars automatisierter Feenflügel zeige. Der erste Teil des Projekts ist der Mechanik der Flügel, und der zweite Teil macht es tragbar und fügt die Flügel hinzu
DIY Circuit Activity Board mit Büroklammern - HERSTELLER - STEM: 3 Schritte (mit Bildern)
")
DIY Circuit Activity Board mit Büroklammern | HERSTELLER | STEM: Mit diesem Projekt können Sie den Weg des elektrischen Stroms ändern, um durch verschiedene Sensoren zu laufen. Mit diesem Design können Sie zwischen dem Aufleuchten einer blauen LED oder dem Aktivieren eines Summers wechseln. Sie haben auch die Wahl, einen lichtabhängigen Widerstand mit
Schnittstellentastatur mit Arduino. [Einzigartige Methode]: 7 Schritte (mit Bildern)
![Schnittstellentastatur mit Arduino. [Einzigartige Methode]: 7 Schritte (mit Bildern)](https://i.howwhatproduce.com/images/008/image-22226-j.webp "Schnittstellentastatur mit Arduino. [Einzigartige Methode]: 7 Schritte (mit Bildern)")
Schnittstellentastatur mit Arduino. [Einzigartige Methode]: Hallo, und willkommen zu meinem ersten instructable! :) In diesem instructables möchte ich eine fantastische Bibliothek für die Schnittstelle der Tastatur mit Arduino teilen - 'Password Library' einschließlich 'Keypad Library'. Diese Bibliothek enthält die besten Funktionen, die wir wi
Einfaches BLE mit sehr geringem Stromverbrauch in Arduino Teil 3 - Nano V2-Ersatz - Rev 3: 7 Schritte (mit Bildern)
")
Einfaches BLE mit sehr geringem Stromverbrauch in Arduino Teil 3 - Nano V2-Ersatz - Rev 3: Update: 7. April 2019 - Rev 3 von lp_BLE_TempHumidity, fügt Datums- / Zeitdiagramme mit pfodApp V3.0.362+ hinzu und automatische Drosselung beim Senden von DatenUpdate: 24. März 2019 – Rev 2 von lp_BLE_TempHumidity, fügt weitere Plotoptionen hinzu und i2c_ClearBus, fügt GT832E