
Inhaltsverzeichnis:
- Schritt 1: Druck- und Montageteil
- Schritt 2: Neue Basis
- Schritt 3: Kleine Korrektur
- Schritt 4: PCB hausgemacht
- Schritt 5: PCB-Ätzen
- Schritt 6: Leiterplatte fräsen
- Schritt 7: Leiterplatte fräsen: Datei für die Produktion abrufen
- Schritt 8: Leiterplatte fräsen: der Fräsprozess
- Schritt 9: Leiterplatte fräsen: Reinigen Sie die Arbeit
- Schritt 10: Löten der Komponente
- Schritt 11: Firmware und Software
- Schritt 12: Testen
- Schritt 13: Setzen Sie die Montage fort
- Schritt 14: Kalibrierung
- Schritt 15: Erster Mandarin-Test
- Schritt 16: Danke
- Autor John Day day@howwhatproduce.com.
- Public 2024-01-30 07:19.
- Zuletzt bearbeitet 2025-01-23 12:52.


Hallo zusammen, Ich werde den berühmten Ciclop 3D-Scanner realisieren.
Alle Schritte, die im ursprünglichen Projekt gut erklärt werden, sind nicht vorhanden.
Ich habe einige Korrekturen vorgenommen, um den Prozess zu vereinfachen, zuerst drucke ich die Basis und dann restilisiere ich die Platine, aber mach weiter.
Schritt 1: Druck- und Montageteil
Für Montageteile ist die beste Lösung, sich auf die Originaldokumentation zu beziehen
www.bq.com/it/support/ciclop/support-sheet
mehrsprachig und gut erklärt.
Die gedruckten Teile sind recht einfach zu montieren.
Es gibt auch viele Videos, das offizielle ist dieses.
Schritt 2: Neue Basis


Das einzige Teil, das schwer zu finden ist, ist der Plexiglassockel, also entwerfe ich mit meinem Anet A8 3D-Drucker einen bedruckbaren.
Das Projekt finden Sie hier.
Schritt 3: Kleine Korrektur


Ein weiteres Problem ist, dass Sie wahrscheinlich einen kostengünstigen Laser finden können, der nicht auf den Originalhalter passt.
Der übliche Laser ist ein 12-mm-Laser.
Sie können also diese gedruckte Variante verwenden.
Ein weiteres Problem besteht darin, das rotierende Teil zu stoppen, ich denke, die bessere Lösung ist die Verwendung eines Gummibandes, wie Sie auf den Bildern sehen können.
Schritt 4: PCB hausgemacht

Für dieses Projekt habe ich eine Platine vollständig kompatibel mit dem Original gemacht. Zum Scan ist es komplexer, aber alle zusätzlichen Funktionen werden nicht verwendet.
Meine Version ist für Arduino Nano, also weniger als das Original.
Wenn Sie nicht die Fähigkeit haben, PCB automatisch zu produzieren, können Sie die Gerber-Datei verwenden, die Sie im Artikel finden, um sie an die Fabrik zu senden, die PCB wie https://www.pcbgogo.com/ herstellt
Schritt 5: PCB-Ätzen
Ich habe diese Technik nie verwendet, aber ich füge diesem Schritt die SVG-Datei oder das PDF für die Produktion hinzu.
Schritt 6: Leiterplatte fräsen
Ich benutze diese Technik für meine persönliche Produktion, dazu schreibe ich 2 Artikel:
Die erste ist eine Schritt-für-Schritt-Anleitung, um eine tragbare CNC zu erstellen, die perfekt und optimiert für das CNC-Fräsen ist.
Hier die Anleitung.
Als eine vorherige Anleitung, die Schritt für Schritt erklärt, wie man die Maschine benutzt, wie man eine Leiterplatte erstellt und wie man eine Datei für die Produktion erstellt.
Hier die andere Anleitung.
Schritt 7: Leiterplatte fräsen: Datei für die Produktion abrufen
Ich füge hier die Datei für die Produktion, den Gerber oder direkt den Gcode für die Fräsmaschine hinzu
Schritt 8: Leiterplatte fräsen: der Fräsprozess



Zuerst den Kupferboden fräsen, dann das Loch bohren.
Schritt 9: Leiterplatte fräsen: Reinigen Sie die Arbeit


Verwenden Sie dann Sandpapier, um das Brett flach und sauber zu machen.
Schritt 10: Löten der Komponente



Für dieses Board verwende ich:
- Arduino Nano
- A4988 Stepper-Treiber
- 2x 1k Widerstand
- 1x 10k Widerstand
- 2x 2n2222 Transistor
- 5.5 Fass für Eingangsspannung
Ich verwende ein 12-V-2A-Netzteil (zum Lauf), um einen Schrittmotortreiber mit Strom zu versorgen.
Dann reicht der USB-Anschluss für Laser und Arduino.
Schritt 11: Firmware und Software

Sie können die Firmware herunterladen, um sie von hier auf den Arduino hochzuladen
github.com/bqlabs/horus-fw
Wie in der Anleitung beschrieben handelt es sich bei der Kamera um eine Logitech C270 HD Webcam, der Treiber hier.
support.logitech.com/en_ca/product/hd-webca…
Hier finden Sie Software.
horus.readthedocs.io/en/release-0.2/
Wenn Sie Probleme beim Herunterladen haben, können Sie hier klicken
github.com/LibreScanner/horus/releases
Schritt 12: Testen

Zuerst teste ich alles ohne Kamera, und es funktioniert gut.
Sie können die ino-Datei verwenden, um Laser und Stepper zu überprüfen
Schritt 13: Setzen Sie die Montage fort


Dann füge ich eine Kamera hinzu, befestige die Platine und füge ein schwarzes Papier oben auf der Plattform hinzu.
Schritt 14: Kalibrierung
Es gibt viele Videos über die Kalibrierung, dieser Schritt ist sehr einfach.
Dieses Minimalvideo realisiere ich mit meinem neuen Ciclop.
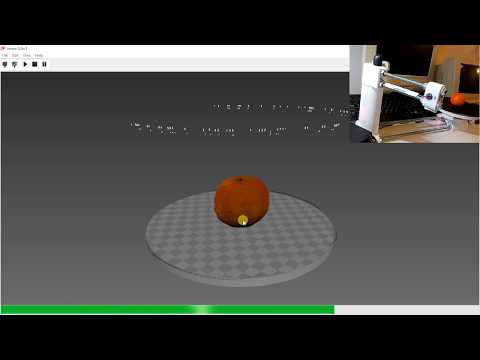
Schritt 15: Erster Mandarin-Test
In diesem Video scanne ich nur das Objekt, aber um ein gutes Bild zu erhalten, müssen Sie eine Nachbearbeitung mit einer Software wie MeshLab durchführen.
Schritt 16: Danke
Jetzt alles scannen.
Empfohlen:
Arduino Auto-Rückfahrwarnsystem - Schritt für Schritt: 4 Schritte

Arduino Auto-Rückfahrwarnsystem | Schritt für Schritt: In diesem Projekt entwerfe ich eine einfache Arduino-Auto-Rückwärts-Parksensorschaltung mit Arduino UNO und dem Ultraschallsensor HC-SR04. Dieses Arduino-basierte Car-Reverse-Warnsystem kann für eine autonome Navigation, Roboter-Ranging und andere Entfernungsr
Drei Lautsprecherkreise -- Schritt-für-Schritt-Anleitung: 3 Schritte

Drei Lautsprecherkreise || Schritt-für-Schritt-Anleitung: Lautsprecherschaltung verstärkt die von der Umgebung empfangenen Audiosignale auf das MIC und sendet sie an den Lautsprecher, von dem aus verstärktes Audio erzeugt wird. Hier zeige ich Ihnen drei verschiedene Möglichkeiten, diese Lautsprecherschaltung zu erstellen:
RC-Tracked-Roboter mit Arduino – Schritt für Schritt: 3 Schritte

RC Tracked Robot mit Arduino – Schritt für Schritt: Hey Leute, ich bin zurück mit einem weiteren coolen Robot-Chassis von BangGood. Ich hoffe, Sie haben unsere vorherigen Projekte durchgegangen – Spinel Crux V1 – Der gestengesteuerte Roboter, Spinel Crux L2 – Arduino Pick-and-Place-Roboter mit Roboterarmen und The Badland Braw
So erstellen Sie eine Website (eine Schritt-für-Schritt-Anleitung): 4 Schritte
: 4 Schritte")
So erstellen Sie eine Website (eine Schritt-für-Schritt-Anleitung): In dieser Anleitung zeige ich Ihnen, wie die meisten Webentwickler ihre Websites erstellen und wie Sie teure Website-Builder vermeiden können, die für eine größere Website oft zu begrenzt sind helfen Ihnen, einige Fehler zu vermeiden, die ich am Anfang gemacht habe
Lernen Sie, wie man eine Kerze zeichnet – Schritt für Schritt: 6 Schritte

Lernen Sie, wie man eine Kerze zeichnet - Schritt für Schritt: Das Zeichnen dieser Kerze dauert 10 Minuten, wenn Sie meinen Schritten sorgfältig folgen