 - Gunook")
Inhaltsverzeichnis:
- Autor John Day day@howwhatproduce.com.
- Public 2024-01-30 07:21.
- Zuletzt bearbeitet 2025-01-23 12:52.


Willkommen zu einem neuen Projekt!!!
Das Wichtigste zuerst Ich wollte unbedingt ein paar gruselige Augen machen, wie sie es für Kostüme und Halloween tun. Ich liebe Spezialeffekte und wollte meine eigenen animatronischen Augen mit einem Arduino, Servos und Tischtennisbällen lernen und bauen.
Schritt 1:
Vorräte sammeln…
2 Servomotoren (ich ging mit dem billigsten möglich in einem Hobby Town Laden)
Arduino Uno (Adafrucht)
Verbindungsstangen (Hobby Town)
2 Halbwellen (Hobby Town)
2 Tischtennisbälle
Anschlüsse (Hobby Town)
Styroporkopf (Michaels)
andere verschiedene Artikel…
Schritt 1: Schritt 2: Malen der Augen


Für Schritt 2 wollte ich fortfahren und die Augäpfel bemalen, die ich selbst gemacht habe. Ja, sie sind etwas daneben, aber von weitem sehen sie toll aus! Wenn Sie Fragen dazu haben, welche Farbe ich verwendet habe, kommentieren Sie einfach unten und fragen Sie:)
Augen machen:
Benötigte Materialien:
4 kleine dünne Pinsel
Farbe
papierhandtuch
Um die Augen zu machen, beginnst du mit zwei Tischtennisbällen und schneidest sie ehrlich gesagt einfach mit einem Exacto-Messer oder einem Cutter in zwei Hälften. Als nächstes malen Sie sie zuerst mit einer weißen Basis, um alle Unvollkommenheiten zu verbergen. Danach beginnen Sie mit dem Schichten, welche Augenfarbe Sie erreichen möchten. Für meine habe ich Grün und Blau verwendet. Meine Farbpalette war grün, blau, weiß und schwarz.
Schritt 2: Schritt 3: Basis zusammenbauen


Schritt 3: Zusammenbau der Basis
Benötigte Materialien:
Acrylplatten
zufälliges Stück Metall
Schrauben
Halbwellen
Bandsäge (nicht erforderlich)
Zuerst schneide ich die gewünschte Form und Größe aus einer Acrylplatte aus. Ich schneide dann die Metallklammern nur aus einem Schrottstück Metall aus. Sobald ich diese dort hatte, wo ich sie haben wollte, bohrte ich die Löcher für die Schrauben und verband die Halterungen wie oben im Bild gezeigt mit der Basis. Für eines meiner Servos musste ich ein kleines Rechteck ausschneiden, um sicherzustellen, dass es dort hineinpasst. Dies sollte sicherstellen, dass die Verbindungen und alles richtig ausgerichtet waren.
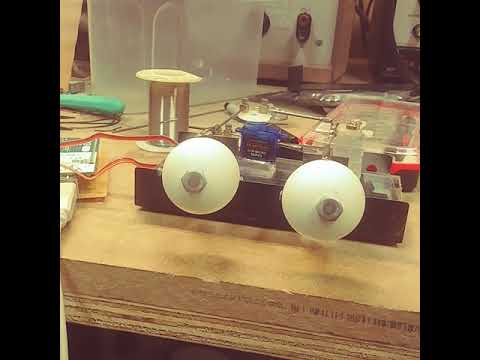
Schritt 3: Schritt 4: Servos und Gestänge platzieren



Schritt 4: Servos und Gestänge platzieren
Benötigte Materialien:
2 Servos
Verbindungen
kleine geschnittene Acrylquadrate
Schrauben
Anschlüsse
Für Schritt 4 habe ich platziert, wo alles hingeht und es ausgelegt. Um sicherzustellen, dass alles gleichmäßig und gleichmäßig sitzt, musste ich kleine ausgeschnittene Acrylstücke unter eines der Servos legen. Ich musste die gleiche Anzahl von Stücken unter das Gestänge legen, das das Auge mit dem Servo verbindet. Nachdem dies alle Stellen und eingeklebt sind (was auch immer Ihre Wahl sein mag, solange es klebt), können Sie die Ösen mit den Links und den Servos verbinden. Eine Nahaufnahme davon ist oben in Bild 4 zu sehen. Nur eine Randnotiz beim Platzieren der Servos und Links muss das Servo, das den Augen am nächsten ist, hochgestellt werden, sowie das Link direkt daneben. Dies liegt daran, dass einer an der x-Achse und der andere an der y-Achse zieht. Dies ist der größte Schritt und einige Dinge müssen möglicherweise optimiert werden, auch nachdem Sie alles verbunden haben.:)
Schritt 4: CODE SCHRITT


Hinzufügen des Codes zum Arduino !! Oben sind Bilder des Codes, der für diese Augen verwendet wird. Ich habe einen Joystick von einem PS1-Controller hinzugefügt, um die Art und Weise zu steuern, wie die Augen gesteuert werden.
Schritt 5: Schritt 5: der Kopf




Dieser Schritt ist optional und braucht Zeit.
Schritt 5: Den Kopf herstellen
Benötigte Materialien
Styroporkopf
Exacto Messer
Heißklebepistole
Dieser Schritt ist nun optional und hat Zeit gekostet. Ich habe wahrscheinlich 2 Stunden gebraucht. Leider hat mein Komplizen das Projekt aus Versehen fallen lassen und mir den Kopf gebrochen, nachdem ich fertig war. Wie auch immer, dafür habe ich gerade herausgefunden, wie tief ich sowohl von unten als auch von oben ausschneiden musste. Der wichtigste Teil sind die Augen, die viel Platz brauchen, um sich zu bewegen und im Kreis zu gehen, wie Sie in Foto 5 sehen können. Die Acrylbasis, die ich gewählt habe, ragte an der Seite heraus, wie Sie in Foto 6 sehen können. Dies kann durch Ohrenschützer oder etwas Lustiges wie eine Perücke abgedeckt werden.
Dann TADDAAAAA!!!!!! Sie sind vollständig mit diesem Projekt fertig.
Ich hoffe, es gefällt Ihnen und kommentieren Sie unten, wenn Sie Fragen oder etwas haben, fragen Sie einfach:)
Empfohlen:
Heimwerken -- Einen Spinnenroboter herstellen, der mit einem Smartphone mit Arduino Uno gesteuert werden kann – wikiHow

Heimwerken || Wie man einen Spider-Roboter herstellt, der mit einem Smartphone mit Arduino Uno gesteuert werden kann: Während man einen Spider-Roboter baut, kann man so viele Dinge über Robotik lernen. Wie die Herstellung von Robotern ist sowohl unterhaltsam als auch herausfordernd. In diesem Video zeigen wir Ihnen, wie Sie einen Spider-Roboter bauen, den wir mit unserem Smartphone (Androi
Bewegungsaktivierte Cosplay Wings mit Circuit Playground Express - Teil 1: 7 Schritte (mit Bildern)
")
Bewegungsaktivierte Cosplay-Flügel mit Circuit Playground Express - Teil 1: Dies ist Teil 1 eines zweiteiligen Projekts, in dem ich Ihnen meinen Prozess zur Herstellung eines Paars automatisierter Feenflügel zeige. Der erste Teil des Projekts ist der Mechanik der Flügel, und der zweite Teil macht es tragbar und fügt die Flügel hinzu
12-Volt-Batterie-Hack! Sie werden Ihren Augen nicht trauen!!!!! (aktualisiert): 7 Schritte
: 7 Schritte")
12-Volt-Batterie-Hack! Sie werden Ihren Augen nicht trauen!!!!! (aktualisiert): Inspiriert von der Anleitung von Kipkay dachte ich, ich würde einige meiner eigenen Batterien einer anderen Marke abholen … Und, Junge, war ich überrascht
Schnittstellentastatur mit Arduino. [Einzigartige Methode]: 7 Schritte (mit Bildern)
![Schnittstellentastatur mit Arduino. [Einzigartige Methode]: 7 Schritte (mit Bildern)](https://i.howwhatproduce.com/images/008/image-22226-j.webp "Schnittstellentastatur mit Arduino. [Einzigartige Methode]: 7 Schritte (mit Bildern)")
Schnittstellentastatur mit Arduino. [Einzigartige Methode]: Hallo, und willkommen zu meinem ersten instructable! :) In diesem instructables möchte ich eine fantastische Bibliothek für die Schnittstelle der Tastatur mit Arduino teilen - 'Password Library' einschließlich 'Keypad Library'. Diese Bibliothek enthält die besten Funktionen, die wir wi
Einfaches BLE mit sehr geringem Stromverbrauch in Arduino Teil 3 - Nano V2-Ersatz - Rev 3: 7 Schritte (mit Bildern)
")
Einfaches BLE mit sehr geringem Stromverbrauch in Arduino Teil 3 - Nano V2-Ersatz - Rev 3: Update: 7. April 2019 - Rev 3 von lp_BLE_TempHumidity, fügt Datums- / Zeitdiagramme mit pfodApp V3.0.362+ hinzu und automatische Drosselung beim Senden von DatenUpdate: 24. März 2019 – Rev 2 von lp_BLE_TempHumidity, fügt weitere Plotoptionen hinzu und i2c_ClearBus, fügt GT832E